
Nieuws
 Thuis / Nieuws / Industrnieuws / Wat zijn de structuur, componenten en werkingsprincipe van een horizontale zwenkaandrijving?
Thuis / Nieuws / Industrnieuws / Wat zijn de structuur, componenten en werkingsprincipe van een horizontale zwenkaandrijving? Wat zijn de structuur, componenten en werkingsprincipe van een horizontale zwenkaandrijving?
 2026.04.27
2026.04.27
 Industrnieuws
Industrnieuws
Hofizontale zwenkaandrijvingen zijn nauwkeurige roterende actuatorconstructies die een draaikranslager, een wormwielreductietrap en een aandrijfbehuizing combineren tot één geïntegreerde eenheid die in staat is om lasten in het horizontale vlak te ondersteunen, roteren en vast te houden. In tegenstelling tot conventionele roterende tandwielkasten die koppel langs een vaste as overbrengen, beheren zwenkaandrijvingen gelijktijdige radiale belastingen, axiale belastingen en kantelmomenten terwijl ze een gecontroleerde rotatie leveren - waardoor ze de geprefereerde aandrijfoplossing zijn voor toepassingen zoals zonnetrackers, bouwkranen, hoogwerkers, industriële robots, satellietantennes en zware draaitafels. Begrijpen hoe horizontale zwenkaandrijvingen worden gebouwd en hoe ze op mechanisch niveau functioneren, is essentieel voor ingenieurs die aandrijfsystemen specificeren, onderhoudspersoneel dat geïnstalleerde apparatuur onderhoudt en inkoopteams die leveranciersopties evalueren.
Algemene structuur van een horizontale zwenkaandrijving
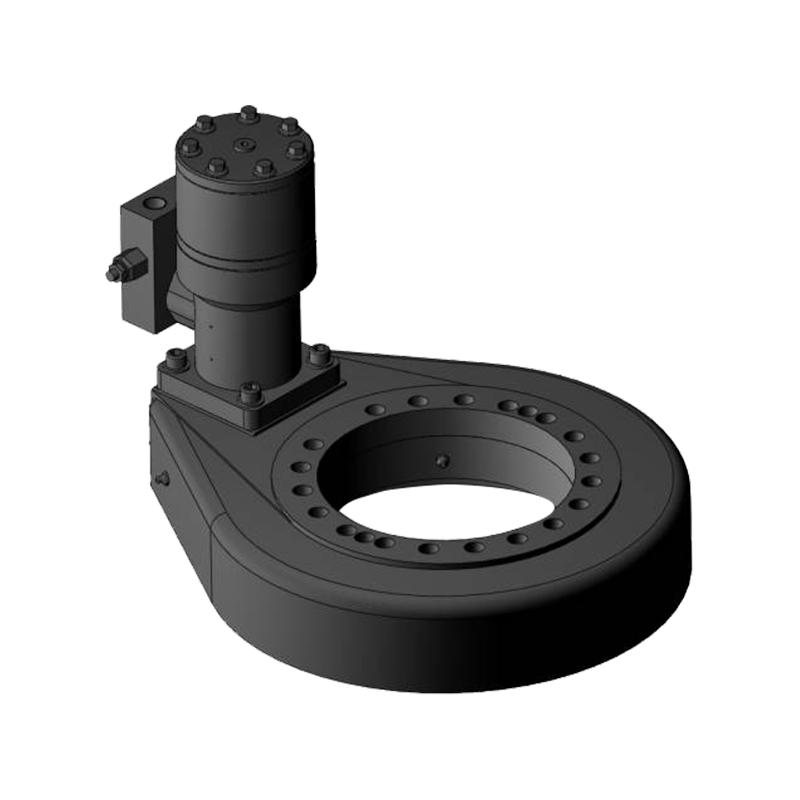
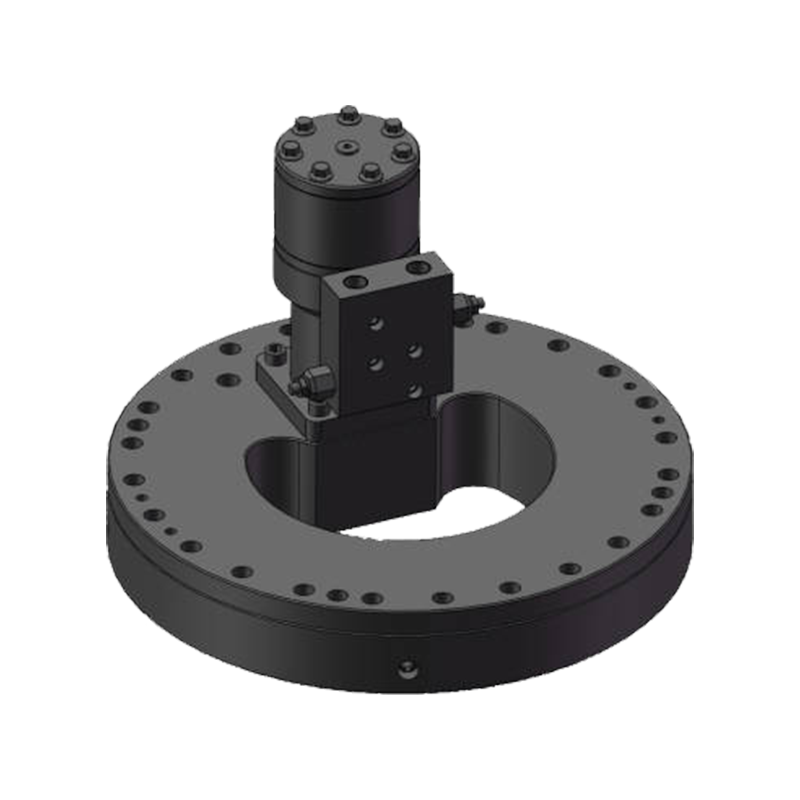
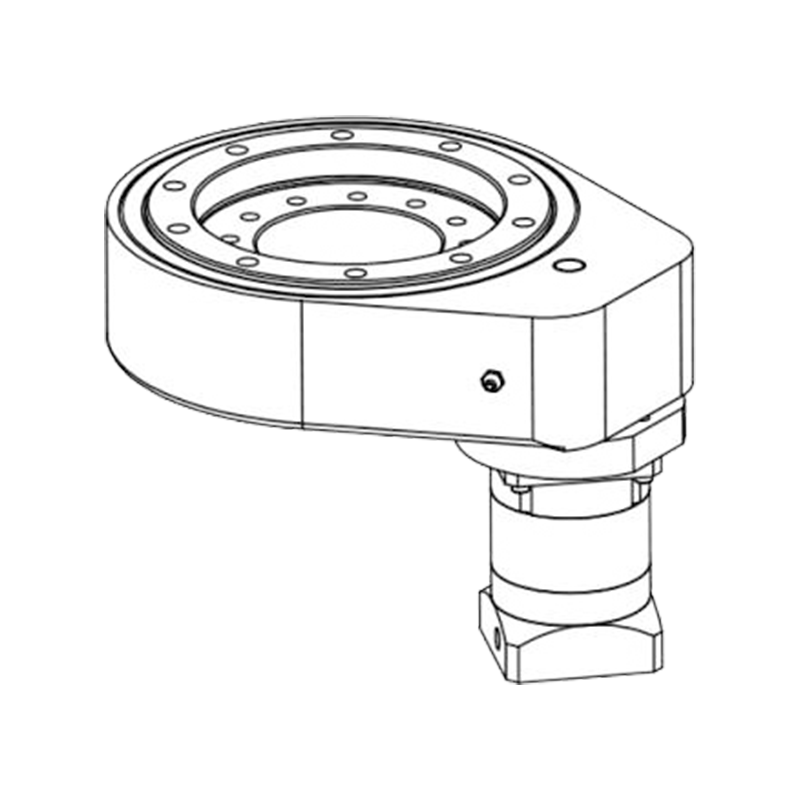
Een horizontale zwenkaandrijving is een op zichzelf staand samenstel dat de functies van lagerondersteuning, tandwielreductie en rotatieaandrijving integreert in één compacte behuizing. In de horizontale configuratie is de as van de hoofddraaikrans verticaal georiënteerd - dat wil zeggen dat de roterende uitvoertafel of flens rond een verticale as in een horizontaal vlak draait, wat de natuurlijke oriëntatie is voor draaitafels, zonne-azimuttrackers en kraanzwenksystemen waarbij de lading horizontaal rond een verticaal middelpunt draait.
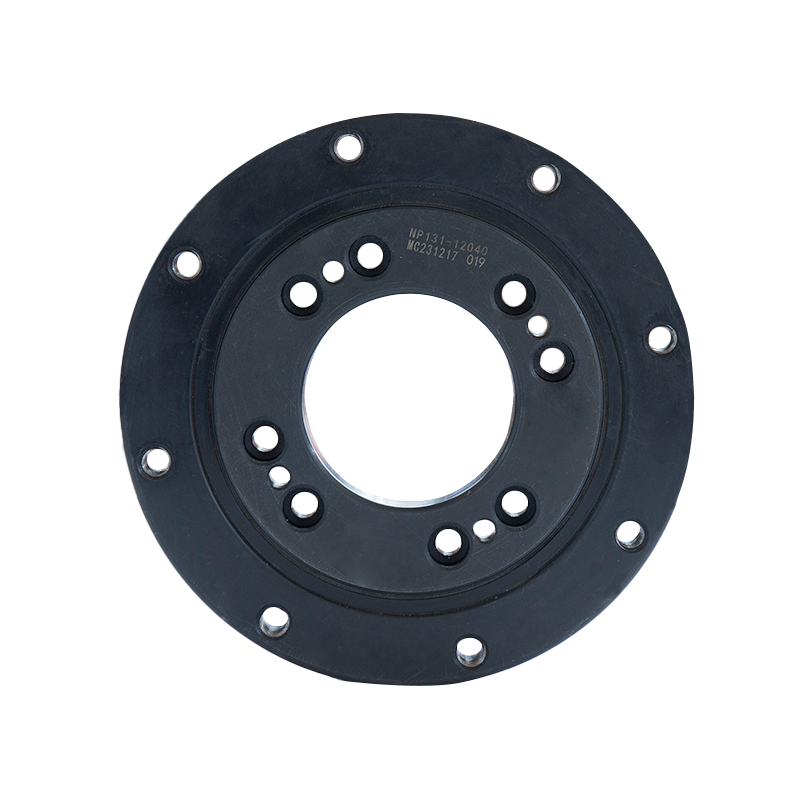
De buitenbehuizing van de zwenkaandrijving is vervaardigd uit gietijzer of nodulair gietijzer en dient zowel als structurele schaal van de versnellingsbak als als montage-interface met de stationaire basisstructuur. De behuizing biedt stijfheid om bestand te zijn tegen de aanzienlijke buigmomenten die worden gegenereerd wanneer excentrische belastingen worden uitgeoefend op de roterende uitgang, en omsluit de tandwieloverbrenging in een afgedichte, gesmeerde omgeving. Montagegaten op het oppervlak en de basis van de behuizing maken een boutverbinding met het machineframe mogelijk bij gestandaardiseerde boutcirkeldiameters, en de uitgaande flens of ring vormt de geschroefde interface met de roterende belasting erboven.
De totale voetafdruk van de assemblage is compact in verhouding tot de ladingen die zij kan verwerken. Een horizontale zwenkaandrijving uit het middensegment van ongeveer Diameter 300 mm kan doorgaans axiale belastingen van meer dan 50 kN, radiale belastingen van meer dan 30 kN en kantelmomenten van meer dan 15 kN·m ondersteunen, terwijl uitgangskoppels worden geleverd in het bereik van 5.000 tot 20.000 N·m, afhankelijk van de motoringang en de gekozen overbrengingsverhouding. Deze vermogensdichtheid in verhouding tot de omhullingsgrootte is een van de belangrijkste technische voordelen die de adoptie van het geïntegreerde zwenkaandrijvingsformaat drijft ten opzichte van afzonderlijk geassembleerde lager-en-versnellingsbakoplossingen.
Kerncomponenten en hun functies
Elke horizontale zwenkaandrijving is opgebouwd rond een reeks mechanische kerncomponenten die samenwerken om de ingangsrotatie van een motor over te brengen in een gecontroleerde uitgangsrotatie met hoog koppel van de draaikrans. Elk onderdeel heeft een specifieke en onvervangbare functie in het belastingspad.
Draaikranslager
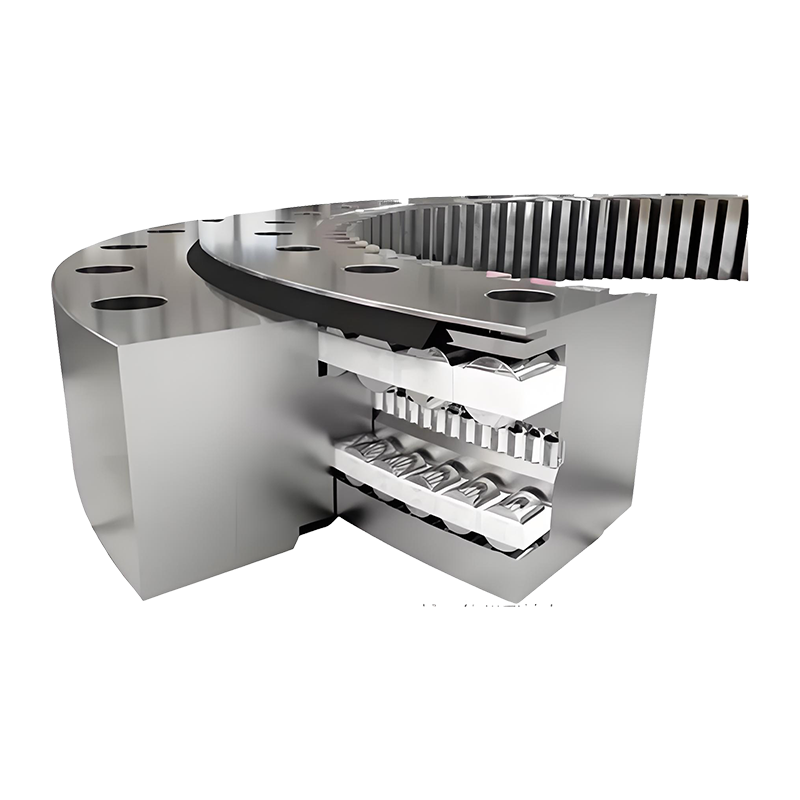
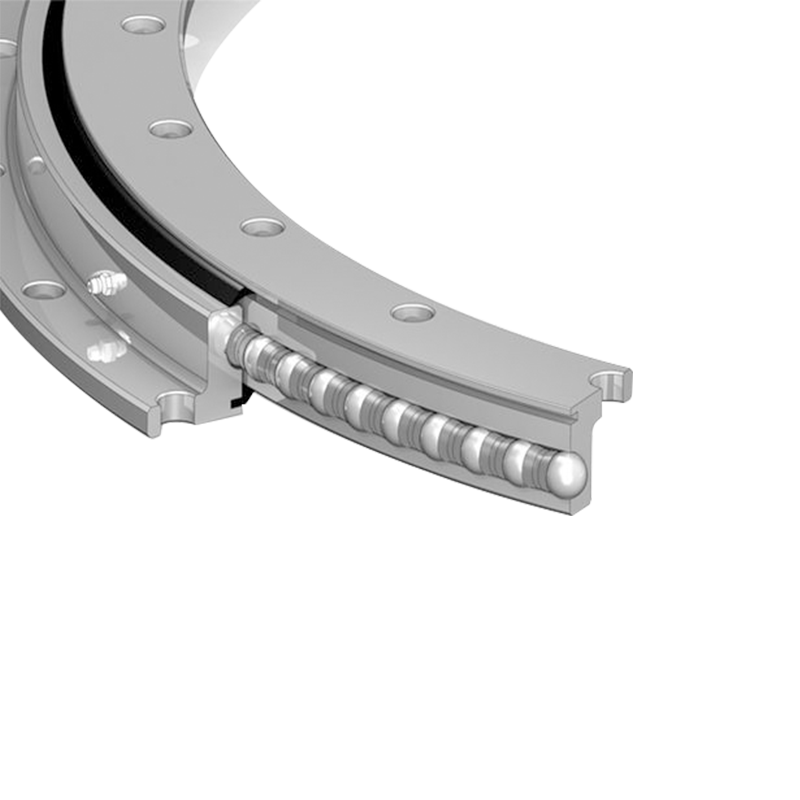
De draaikrans is het centrale structurele onderdeel van het geheel. Het is een wentellager met een grote diameter en een geïntegreerd tandwiel - meestal een wormwielring - dat in de binnen- of buitenring is bewerkt. Bij horizontale zwenkaandrijvingen wordt het tandwiel meestal machinaal in het binnenoppervlak van de buitenring of het buitenoppervlak van de binnenring bewerkt, afhankelijk van het specifieke ontwerp. De rollende elementen tussen de binnen- en buitenringen dragen alle uitgeoefende belastingen - axiale kracht van het gewicht van de lading, radiale kracht van horizontale belasting en kantelmoment van excentrische belastingen - terwijl ze ervoor zorgen dat de ringen ten opzichte van elkaar kunnen roteren met minimale wrijving.
Meestal worden draaikransen in horizontale aandrijvingen gebruikt eenrijige vierpuntscontactkogellagers or gekruiste rollagers . Vierpuntscontactkogellagers maken gebruik van een gotisch boogloopprofiel waardoor elke kogel op vier punten tegelijk contact kan maken met de loopring, waardoor een enkele rij kogels axiale belastingen vanuit beide richtingen, radiale belastingen en kantelmomenten kan dragen. Gekruiste rollagers wisselen cilindrische rollen af in een hoek van 90 graden in een enkele rij, waardoor een zeer hoge stijfheid en momentcapaciteit wordt bereikt in een dunne dwarsdoorsnede. Beide typen worden gebruikt in horizontale zwenkaandrijvingen, waarbij ontwerpen met gekruiste rollen de voorkeur genieten wanneer maximale stijfheid en nauwkeurigheid vereist zijn, en ontwerpen met vierpuntscontactkogels die de voorkeur genieten vanwege de kosteneffectiviteit bij zwaardere maar minder precisie-eisende toepassingen.
Wormwielset
De wormwielreductietrap is het mechanisme waarmee het motorkoppel wordt vermenigvuldigd en de ingangssnelheid wordt verlaagd tot de lage snelheid en het hoge koppel die voor de toepassing vereist zijn. De wormas – een as met spiraalvormige schroefdraad die rechtstreeks door de ingangsmotor wordt aangedreven – grijpt in de ringtanden op de draaikrans, die fungeert als wormwiel in het tandwielpaar. Terwijl de wormas draait, genereert de spiraalhoek van de wormdraad een tangentiale kracht op de tandkrans, waardoor deze en de draaikrans rond de rotatieas worden geduwd.
Wormoverbrengingsverhoudingen bij zwenkaandrijvingen variëren doorgaans van 20:1 tot 100:1 of hoger binnen één enkele reductietrap, waardoor een aanzienlijke koppelvermenigvuldiging wordt verkregen uit compacte motorpakketten. De wormas wordt doorgaans vervaardigd uit gehard gelegeerd staal met een geslepen draadprofiel om nauwkeurig tandcontact te bereiken en speling te minimaliseren. De tanden van de ringtandwielen worden gewoonlijk gesneden uit doorgehard koolstofstaal of, bij premium ontwerpen, uit een bronslegering, die gunstige wrijvingseigenschappen biedt tegen de staalworm en de slijtage van beide componenten vermindert.
Wormaslagers en behuizing
De wormas wordt aan beide uiteinden in de behuizing ondersteund door wentellagers - meestal kegellagers of hoekcontactkogellagers - die de radiale belastingen dragen die worden gegenereerd door de ingrijping van het worm-ringtandwiel en de axiale drukkrachten die worden gegenereerd door de helixhoek van de wormdraad. Een juiste voorspanning op deze aslagers is van cruciaal belang voor het handhaven van consistent contact tussen worm en ringtandwiel over het volledige belastingsbereik van de aandrijving. Door een ontoereikende voorspanning kan de wormas onder belasting doorbuigen, waardoor de speling toeneemt en de tandslijtage wordt versneld; overmatige voorspanning verhoogt de lagerwrijving en de warmteontwikkeling, waardoor de mechanische efficiëntie wordt verminderd en de levensduur van de lagers wordt verkort.
Afdichtingssysteem
Effectieve afdichting is van cruciaal belang voor een langere levensduur van de zwenkaandrijving, vooral bij buitentoepassingen zoals zonnetrackers en mobiele kranen, waarbij de constructie wordt blootgesteld aan regen, stof, temperatuurwisselingen en UV-straling. Horizontale zwenkaandrijvingen maken gebruik van een combinatie van labyrintafdichtingen, lipafdichtingen en O-ringvlakafdichtingen op het grensvlak tussen de roterende ring en de stationaire behuizing, en bij de ingangspunten van de wormas in de behuizing. De holte van het rolelement van de draaikrans wordt doorgaans afgedicht door rubberen afdichtingen die aan de lagerringen zijn bevestigd, waardoor verlies van smeermiddel en het binnendringen van verontreinigingen bij het primaire lagerinterface worden voorkomen.
Werkingsprincipe: hoe rotatie en koppel worden gegenereerd
De werkingsvolgorde van een horizontale zwenkaandrijving begint bij de motor - ofwel een elektromotor met een ingangstrap van een planetaire versnellingsbak, een hydraulische motor, of in sommige ontwerpen een servomotor met directe aandrijving - die is gemonteerd op de ingangsflens van de wormas van de behuizing. Terwijl de motoras draait, draait de wormas op ingangssnelheid. De spiraalvormige schroefdraad van de wormas is continu in ingrijping met de tandkransen van de binnen- of buitenloopring van de draaikrans.
De geometrie van het worm-ringtandwiel zet de snelle rotatiebeweging van de wormas om in de langzame rotatie met hoog koppel van de draaikrans via een mechanisch voordeel dat wordt bepaald door de overbrengingsverhouding. Als de wormas een volledige omwenteling maakt, beweegt de draaikrans een aantal tandkransen vooruit, gelijk aan het aantal schroefdraadbeginjes op de worm. Een worm met één start die een ringwiel met 60 tanden voortbeweegt, produceert een Overbrengingsverhouding van 60:1 — één volledige wormomwenteling verplaatst het ringwiel met precies één tandsteek, en 60 wormomwentelingen voltooien één volledige rotatie van de draaikrans.
De tangentiële kracht die door de wormdraad op de tanden van het ringtandwiel wordt uitgeoefend, is het product van het ingangskoppel vermenigvuldigd met de overbrengingsverhouding en de mechanische efficiëntie van de wormingrijping. Wormwielen zijn mechanisch minder efficiënt dan spiraalvormige tandwielen met parallelle assen vanwege het glijdende contact tussen worm- en wieltanden in plaats van het rollende contact van spiraalvormige tandwielparen. Efficiëntiewaarden voor wormaangedreven zwenkaandrijvingen vallen doorgaans in de Bereik van 50% tot 80% , afhankelijk van de inloophoek van de worm, de smeringstoestand en de gebruikte materialen. Hogere voorloophoeken (meerstartwormen) verbeteren de efficiëntie, maar verminderen de overbrengingsverhouding per trap; lagere voorloophoeken verbeteren de overbrengingsverhouding, maar verminderen de efficiëntie en verhogen de warmteontwikkeling bij hoge invoersnelheden.
Zelfsluitend gedrag
Een van de belangrijkste functionele kenmerken van de wormaangedreven horizontale zwenkaandrijving is het inherente zelfremmende vermogen. Wanneer de inloophoek van de worm onder een drempelwaarde ligt – doorgaans onder ongeveer 6 tot 8 graden , hoewel exacte waarden afhankelijk zijn van wrijvingscoëfficiënten - de geometrie van de tandwieloverbrenging voorkomt dat het ringtandwiel de wormas terugdrijft. Dit betekent dat wanneer de motorkracht wordt verwijderd, de zwenkaandrijving onder belasting zijn positie behoudt zonder dat een afzonderlijk remsysteem nodig is. De reactiekracht van de belasting op de tanden van het ringtandwiel genereert een krachtcomponent langs de as van de wormas, maar wrijving in het worm-wielcontact verhindert dat deze kracht de statische wrijving overwint en de worm laat draaien.
Zelfremmend is een cruciaal veiligheidskenmerk in toepassingen zoals zonnetrackers, hoogwerkers en materiaaltransportapparatuur waarbij de aandrijving een vaste positie moet behouden onder toegepaste belastingen tijdens stroomonderbrekingen of storingen in het besturingssysteem. Het elimineert de noodzaak van externe vasthoudremmen in veel toepassingen, waardoor het systeemontwerp wordt vereenvoudigd en het aantal componenten wordt verminderd. Zelfremmende zwenkaandrijvingen kunnen echter niet achteruit worden aangedreven voor handmatige noodpositionering, waarmee bij de planning van de machineveiligheid rekening moet worden gehouden.

Laadvermogenparameters en selectiespecificaties
Het selecteren van de juiste horizontale zwenkaandrijving voor een bepaalde toepassing vereist het tegelijkertijd evalueren van vier primaire belastingsparameters, omdat het draaikranslager alle toegepaste belastingen gedurende zijn hele levensduur gelijktijdig moet ondersteunen.
| Laadparameter | Definitie | Primaire draagcomponent | Typische eenheid |
|---|---|---|---|
| Axiale belasting | Kracht parallel aan rotatie-as (verticaal bij horizontale aandrijving) | Draaikransrolelementen | kN |
| Radiale belasting | Kracht loodrecht op rotatie-as (horizontaal) | Draaikransrolelementen | kN |
| Omvallend moment | Buigmoment door excentrische belasting of zijdelingse kracht | Draaikranslagerpaar | kN·m |
| Uitgangskoppel | Roterend aandrijfkoppel geleverd aan de lading | Wormwielgaas en ringtandwiel | N·m |
Een cruciaal aspect bij de selectie van zwenkaandrijvingen is dat deze vier parameters op elkaar inwerken: een aandrijving die in de buurt van zijn nominale kantelmomentcapaciteit werkt, heeft de beschikbare axiale en radiale belastingscapaciteit verminderd, en omgekeerd. Tabellen met classificaties van fabrikanten bieden gecombineerde belastingcapaciteitsbereiken, en een juiste selectie vereist het uitzetten van de daadwerkelijk toegepaste belastingscombinatie tegen deze enveloppen in plaats van individuele parameters afzonderlijk te vergelijken.
Smeersysteem en onderhoudsvereisten
De prestaties op lange termijn van een horizontale zwenkaandrijving worden rechtstreeks bepaald door de kwaliteit en consistentie van het smeerprogramma. Er moeten twee afzonderlijke smeercircuits worden onderhouden: het circuit van het draaikransrolelement en het wormwiel-ingrijpcircuit, die in de meeste ontwerpen een gemeenschappelijk oliebad in de behuizing delen, maar mogelijk verschillende smeermiddelkwaliteiten vereisen bij toepassingen met hoge prestaties of extreme temperaturen.
Het wormwielgaas wordt doorgaans gesmeerd door oliespatten uit een reservoir dat zich op de bodem van de behuizing bevindt, tot een niveau waarbij het onderste deel van de tanden van het ringtandwiel tijdens het draaien in de olie kan dompelen, waardoor smeermiddel in de contactzone van het gaas wordt getransporteerd. Aanbevolen smeermiddelen zijn tandwieloliën met EP-additieven (Extreme Pressure), geformuleerd voor wormwieltoepassingen, waarbij de viscositeitsklassen ISO VG 220 of VG 460 het meest worden gespecificeerd. De hoge glijsnelheid in het contact tussen worm en wiel genereert warmte die moet worden beheerd door de viscositeits-temperatuurkarakteristieken van het smeermiddel en de olieverversingsintervallen van 2.000 tot 4.000 bedrijfsuren zijn typisch voor aandrijvingen in buitengebruik.
De draaikransrolelementen vereisen vetsmering via smeernippels op de ring of behuizing. Het vet moet in de loopring van het rolelement doordringen via vetverdelingsgroeven die in de loopringen zijn aangebracht. Bij installaties buitenshuis moeten de nasmeerintervallen worden afgestemd op het onderhoudsschema van de toepassing – doorgaans elke 6 tot 12 maanden voor toepassingen met zonnetrackers en vaker voor bouwmaterieel dat wordt blootgesteld aan was- en vervuilingscycli.
Typische toepassingen van horizontale zwenkaandrijvingen
De ontwerpkenmerken van horizontale zwenkaandrijvingen – compacte geïntegreerde constructie, zelfremmend vermogen, hoog kantelmomentvermogen en gecontroleerde rotatie bij lage snelheid – maken ze geschikt voor een specifiek en goed gedefinieerd scala aan toepassingen waarbij deze eigenschappen tegelijkertijd vereist zijn.
- Fotovoltaïsche trackers op zonne-energie: Enkelassige azimuttrackers voor zonneparken op grote schaal maken gebruik van horizontale zwenkaandrijvingen om paneelarrays rond een verticale as te roteren, waarbij ze de azimutbeweging van de zon gedurende de dag volgen. De zelfvergrendelende eigenschap houdt de paneelpositie nauwkeurig vast tijdens windbelasting zonder continu motorvermogen, waardoor het energieverbruik en de complexiteit van het besturingssysteem aanzienlijk worden verminderd.
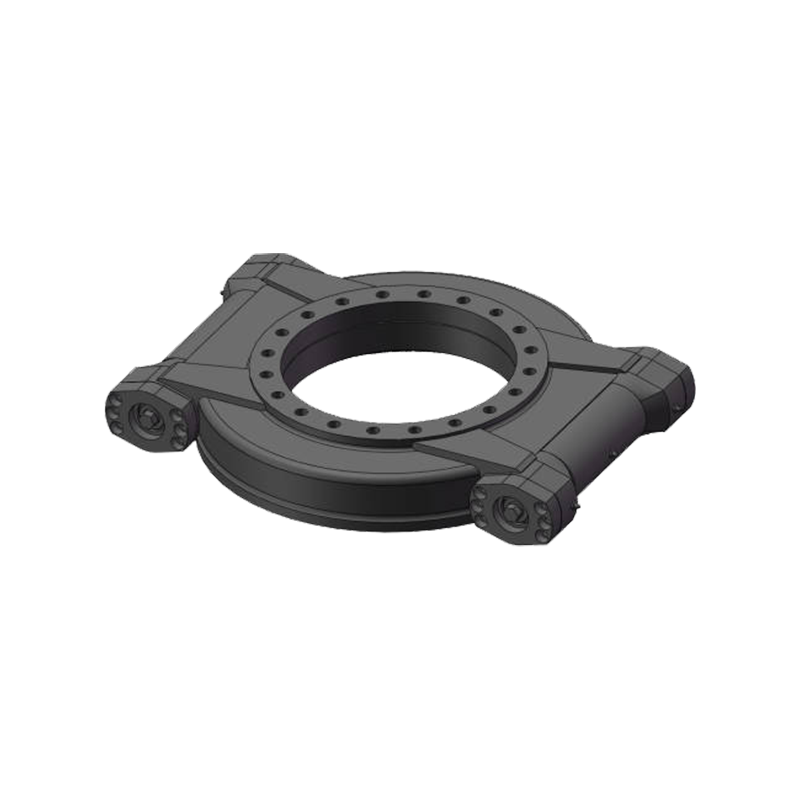
- Mobiele kranen en verreikers: De bovenste zwenkconstructie van mobiele kranen roteert op horizontale zwenkaandrijvingen die het volledige kantelmoment van de giek en de geheven last moeten ondersteunen en tegelijkertijd zorgen voor een soepele, gecontroleerde rotatie tijdens zwenkwerkzaamheden. Een hoog kantelmoment in combinatie met zelfremmende lastopname zijn beide van cruciaal belang in deze toepassing.
- Hoogwerkers (AWP’s) en hoogwerkers: De draaitafel aan de basis van de giekconstructie roteert op een horizontale zwenkaandrijving en ondersteunt het volledige gewicht van de uitgeschoven giek, het platform en de inzittenden als een kantelmoment. Een compact omhulsel binnen de basisstructuur van de machine is een belangrijke vereiste waaraan geïntegreerde zwenkaandrijvingen efficiënt kunnen voldoen.
- Industriële klepstandstellers en lasdraaitafels: Hofizontale zwenkaandrijvingen rotate workpieces around a vertical axis for welding, inspection, or assembly operations, providing precise angular positioning under substantial workpiece weight. The combination of high axial load capacity and accurate positioning from the worm gear mesh makes them well-matched to this application class.
- Satellietcommunicatieantennes: Op de grond gebaseerde volgantennes maken gebruik van horizontale zwenkaandrijvingen voor azimutrotatie, waarbij nauwkeurige positionering met minimale speling vereist is om de antennebundel uitgelijnd te houden met bewegende satellieten. In deze toepassingen worden nauwkeurig geslepen wormprofielen en voorgespannen wormaslagers gespecificeerd om hoekpositioneringsfouten te minimaliseren.

Jiangsu Manchen Transmission Technology Co., Ltd. blinkt uit in het creëren van aangepaste, betrouwbare en precieze doodsleiders voor diverse industrieën, die voortdurend innoveren om aan de hoogste normen te voldoen en samenwerkingsmogelijkheden te zoeken. Betrouwbare en stabiele leverancier van de slewinglagers in China.
Productlinks
Neem contact met ons op
-
Address:Nr. 8, Nanqiu Road, Huangtu Town, Jiangyin City, China
-
Tel:+86-136461222221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
