
Nieuws
 Thuis / Nieuws / Industrnieuws / Hoe kiest u de juiste horizontale zwenkaandrijving voor uw toepassing?
Thuis / Nieuws / Industrnieuws / Hoe kiest u de juiste horizontale zwenkaandrijving voor uw toepassing? Hoe kiest u de juiste horizontale zwenkaandrijving voor uw toepassing?
 2026.05.13
2026.05.13
 Industrnieuws
Industrnieuws
Het selecteren van de juiste horizontale zwenkaandrijving is een van die beslissingen die op het eerste gezicht eenvoudig lijken, maar al snel lagen van complexiteit onthullen als je je verdiept in de toepassingsvereisten. Een slechte selectie presteert niet alleen ondermaats; ze faalt voortijdig, zorgt voor onderhoudslasten en kan in veiligheidskritieke systemen kostbare stilstand of ongelukken veroorzaken. Deze gids doorloopt elke betekenisvolle selectievariabele en biedt ingenieurs en inkoopspecialisten een praktisch raamwerk om meteen de juiste beslissing te nemen.
Wat een horizontale zwenkaandrijving eigenlijk doet
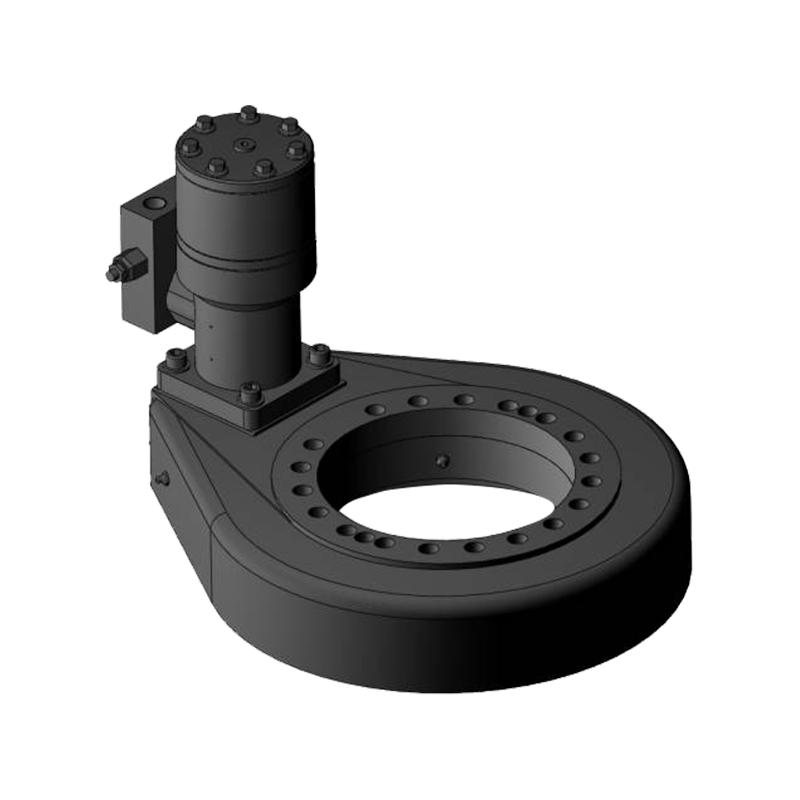
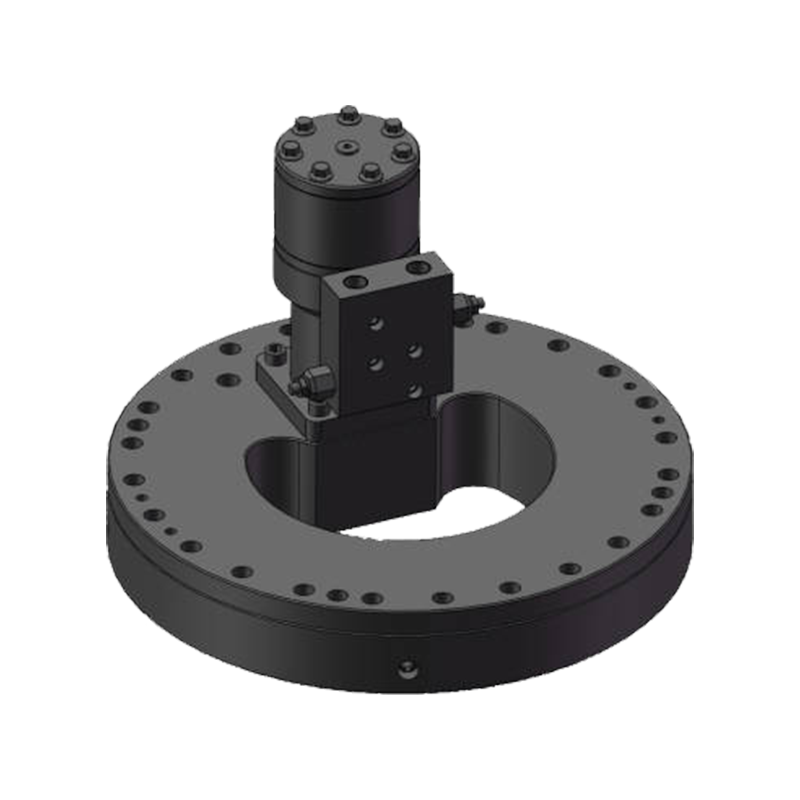
Een horizontale zwenkaandrijving is een volledig gesloten roterende actuator die een wormwielreductiemechanisme combineert met een draaikranslager in één geïntegreerde behuizing. De draaikrans kan de radiale, axiale en momentbelastingen aan die worden opgelegd door de roterende structuur erboven, terwijl het wormwiel het mechanische voordeel biedt dat nodig is om die rotatie aan te drijven met een relatief kleine motorinvoer. "Horizontaal" verwijst naar de oriëntatie van de uitgangsas van de aandrijving; de rotatie vindt plaats rond een verticale as, waardoor dit de logische keuze is voor toepassingen waarbij een structuur moet zwaaien, pannen of continu moet roteren in het horizontale vlak.
In tegenstelling tot op zichzelf staande draaikransen in combinatie met externe versnellingsbakken, vereenvoudigt een geïntegreerde horizontale zwenkaandrijving de installatie, verbetert de afdichtingsintegriteit en vermindert de technische inspanning die nodig is om de omringende structuur te ontwerpen. Deze integratie is precies de reden waarom ze toepassingen domineren zoals zonnetrackers, kraandraaitafels, hoogwerkers, giersystemen voor windturbines en positioneerders voor satellietantennes - overal waar compacte, op zichzelf staande roterende aandrijving met een hoog draagvermogen vereist is.
Belastingsanalyse: het niet-onderhandelbare startpunt
Elke selectie van horizontale zwenkaandrijvingen begint met een volledige belastingsanalyse. Het overslaan of benaderen van deze stap is de meest voorkomende bron van voortijdig falen. Er zijn drie belastingcategorieën die de aandrijving tegelijkertijd moet verwerken, en ze moeten alle drie worden gekwantificeerd voordat een catalogusvergelijking begint.
Axiale belasting
Axiale belasting werkt parallel aan de uitgangsas van de aandrijving; bij een horizontale zwenkaandrijving is dit doorgaans het eigen gewicht van de roterende structuur erboven. Een zonnepaneelarray, een bovenbouw van een kraandraaitafel of een antenneconstructie leggen allemaal hun gewicht neerwaarts door de aandrijving. Dit is de meest eenvoudige belasting om te berekenen: het is in wezen de totale massa van alles wat boven de aandrijving draait, vermenigvuldigd met de zwaartekrachtversnelling en uitgedrukt in kilonewton.
Radiale belasting
De radiale belasting werkt loodrecht op de uitgangsas - horizontaal, in het geval van een horizontale zwenkaandrijving. Winddruk op een groot paneel of antenne is de meest voorkomende bron van radiale belasting bij buitentoepassingen. Excentrische belasting veroorzaakt door een zwaartepunt buiten het midden van het roterende samenstel draagt ook bij aan een radiale component. Radiale belastingen zijn vaak dynamisch en richtingsvariabel, waardoor het schatten van de piekwaarde van cruciaal belang is in plaats van het berekenen van de gemiddelde waarde.
Omvallend moment
Het kantelmoment is de buigbelasting die probeert de roterende structuur ten opzichte van het aandrijfhuis te kantelen. Het wordt gegenereerd wanneer het zwaartepunt van het roterende samenstel zich niet direct boven de rotatiehartlijn van de schijf bevindt, of wanneer horizontale krachten (zoals wind) op een hoogte boven het montagevlak van de schijf werken. Het kantelmoment wordt uitgedrukt in kilonewtonmeter en is vaak de meest veeleisende belastingparameter; veel aandrijvingen die de axiale en radiale belastingcontroles doorstaan, falen op het gebied van het kantelmoment.
Koppelvereisten en motorafmetingen
Zodra de belastingen zijn vastgesteld, moet het vereiste uitgangskoppel worden berekend. Dit is het koppel dat nodig is aan de uitgangsring van de aandrijving om alle weerstandskrachten te overwinnen en de belasting binnen een acceptabele tijd tot de vereiste rotatiesnelheid te versnellen. De belangrijkste factoren die bijdragen aan het vereiste koppel zijn wrijving in het draaikranslager (die toeneemt met de axiale belasting en het kantelmoment), aerodynamische weerstand op de roterende structuur en het traagheidskoppel dat nodig is tijdens acceleratiefasen.
Horizontale zwenkaandrijvingen worden gespecificeerd door hun nominale houdkoppel en hun nominale werkkoppel; dit zijn niet dezelfde cijfers. Het houdkoppel is de maximale statische belasting die de aandrijving kan verdragen zonder rotatie; werkkoppel is het continu beschikbare koppel tijdens bedrijf. De zelfremmende eigenschap van het wormwiel (aanwezig wanneer de voorloophoek kleiner is dan de wrijvingshoek, meestal wanneer de overbrengingsverhouding groter is dan ongeveer 20: 1) betekent dat veel horizontale zwenkaandrijvingen hun positie onder belasting kunnen behouden zonder een afzonderlijke rem - een functie die het systeemontwerp vereenvoudigt in toepassingen zoals zonnetrackers waarbij de aandrijving een paneelhoek tegen windbelasting moet houden zonder voortdurende motorbekrachtiging.
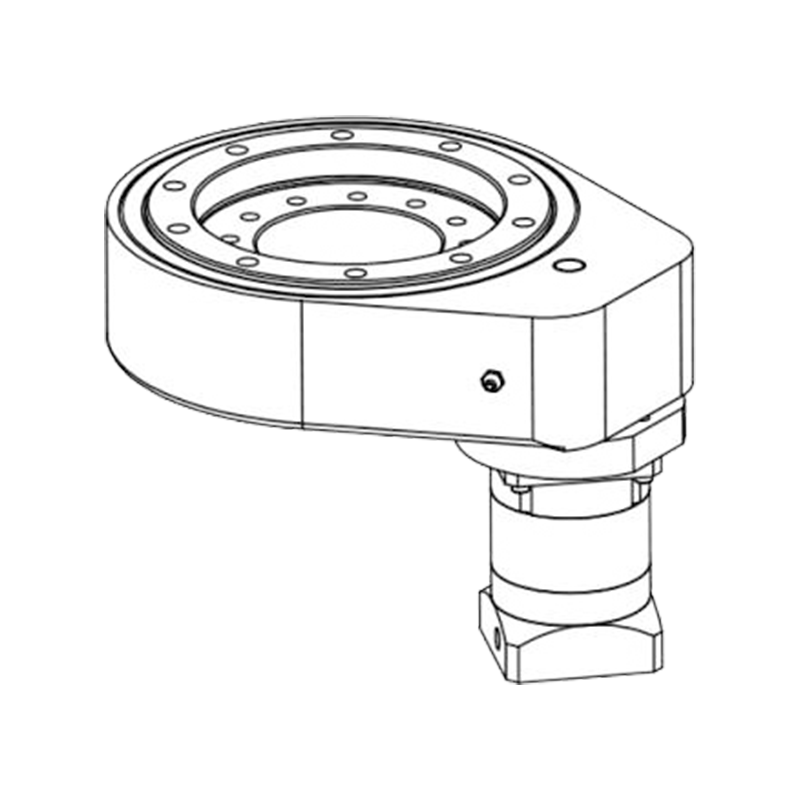
De motorselectie volgt uit het vereiste ingangskoppel (uitgangskoppel gedeeld door de overbrengingsverhouding, aangepast voor aandrijfefficiëntie) en het vereiste ingangstoerental (uitgangstoerental vermenigvuldigd met de overbrengingsverhouding). De meeste horizontale zwenkaandrijvingen zijn geschikt voor standaard IEC- of NEMA-framemotoren, en vele worden motorklaar geleverd met een machinaal bewerkte motormontageflens.
Sleutelselectieparameters vergeleken
| Parameter | Wat te bepalen | Gemeenschappelijk bereik | Selectierisico indien ondergespecificeerd |
| Axiale belasting Capacity | Totale roterende massa × zwaartekracht | 5 kN – 2.000 kN | Vervorming van het lagerloopvlak, vastlopen |
| Omvallend moment | Excentrische belasting × momentarm | 0,5 kNm – 500 kNm | Tandwieltand defect, kantelen |
| Werkend koppel | Traagheidskoppel door wrijvingsweerstand | 0,5 kNm – 200 kNm | Overbelasting van de motor, slijtage van het wormwiel |
| Uitvoersnelheid | Vereiste zwenksnelheid (°/min of rpm) | 0,01 – 10 tpm | Positioneringsfout, thermische overschrijding |
| Overbrengingsverhouding | Zelfremmende behoefte vs. efficiëntie | 20:1 – 100:1 | Achteruit rijden, rembehoefte |
Milieu- en belastingscyclusoverwegingen
Een aandrijving die op papier aan de mechanische belastingseisen voldoet, kan alsnog vroegtijdig uitvallen als de omgevingsspecificatie niet klopt. Horizontale zwenkaandrijvingen worden op grote schaal buiten ingezet, vaak onder zware omstandigheden, en de behuizing, afdichting en oppervlaktebehandeling moeten worden afgestemd op de werkomgeving.
- IP-classificatie: Voor buitentoepassingen is doorgaans een minimum van IP65 vereist om stof- en waterstralen uit te sluiten. Maritieme of kustomgevingen vereisen IP67 of hoger, met roestvrijstalen bevestigingsmiddelen en extra corrosiebescherming op blootgestelde oppervlakken. Controleer of de IP-classificatie van toepassing is op de volledig geassembleerde schijf, inclusief de motorinterface. Sommige schijven hebben een IP65-classificatie op de behuizing, maar hebben onbeschermde motormontagevlakken die ingangspunten worden.
- Temperatuurbereik: Standaard smeermiddelen presteren goed tussen −20°C en 80°C. Toepassingen in arctische omgevingen, woestijninstallaties of in de buurt van industriële warmtebronnen vereisen gespecificeerde vetten voor lage of hoge temperaturen. Bevestig de smeermiddelspecificaties van de fabrikant van de aandrijving en het temperatuurbereik dat deze bestrijkt voordat u de selectie voor toepassingen in extreme klimaten voltooit.
- Inschakelduur: Horizontale zwenkaandrijvingen in solar tracking applications typically operate intermittently — a brief movement every few minutes — placing low thermal demands on the worm gear assembly. Drives used in continuous-rotation applications such as antenna positioners or turntables face much higher thermal loads and require duty cycle ratings (expressed as operating time percentage) that match the application. Exceeding the duty cycle rating leads to lubricant degradation and accelerated worm gear wear.
- Corrosiebescherming: Standaardaandrijvingen maken gebruik van met zinkfosfaat behandelde en geverfde stalen behuizingen die geschikt zijn voor gebruik in het binnenland. Kust- en offshore-installaties vereisen thermisch verzinkte behuizingen, roestvrijstalen uitgangsringen of oppervlakken met een epoxycoating, afhankelijk van de corrosiviteitscategorie van de locatie.
Montageconfiguratie en interfacegeometrie
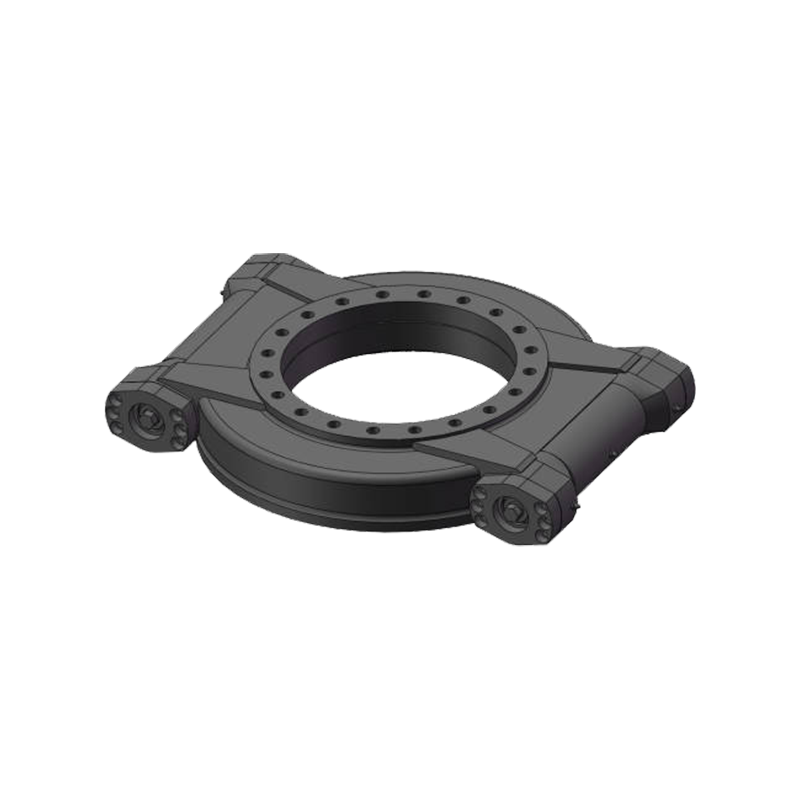
De fysieke integratie van de zwenkaandrijving in de omringende structuur is een praktische beperking die moet worden opgelost tijdens de selectie, niet tijdens de installatie. Horizontale zwenkaandrijvingen zijn verkrijgbaar met verschillende uitgangsringconfiguraties – externe tandwielen (tanden aan de buitenkant van de uitgaande ring), interne tandwielen (tanden aan de binnenkant) en tandloze (wrijvingsaangedreven of directe verbinding) – elk geschikt voor verschillende kinematische opstellingen. Externe tandwieluitgangsringen komen het meest voor en maken het mogelijk de wormas buiten de ringdiameter te plaatsen, waardoor de motor en versnellingsbak toegankelijk blijven voor onderhoud. Interne tandwielconfiguraties worden gebruikt wanneer de aandrijving moet worden geïntegreerd in een compact roterend samenstel.
De afmetingen van de boutcirkels op zowel de vaste behuizing als de roterende uitgangsring moeten worden geverifieerd aan de hand van de passende structuur. Veel fabrikanten bieden standaard boutpatronen, montageflenzen en uitgaande asinterfaces aan als standaardopties; het specificeren hiervan in de bestelfase is veel goedkoper dan het bewerken van adapters in het veld. Controleer ook de diameter van het doorvoergat als kabels, hydraulische leidingen of pneumatische slangen door het midden van de aandrijving moeten gaan; niet alle horizontale zwenkaandrijvingen hebben een middenboring en het achteraf aanbrengen van deze functie is niet mogelijk.

Veiligheidsfactoren en levensduurverwachtingen
Gepubliceerde belastingswaarden voor horizontale zwenkaandrijvingen zijn doorgaans gebaseerd op berekeningen van de statische belasting of dynamische levensduur door vermoeidheid, en het toepassen van een geschikte veiligheidsfactor boven de berekende bedrijfsbelasting is standaard technische praktijk. Voor de meeste niet-veiligheidskritieke toepassingen is een veiligheidsfactor van 1,5× tot 2× op het werkkoppel en het draagvermogen geschikt. Voor toepassingen waarbij het falen van de aandrijving een risico voor het personeel met zich meebrengt – hoogwerkers, medische positioneringsapparatuur of op voertuigen gemonteerde kranen – kunnen veiligheidsfactoren van 3× of hoger worden gespecificeerd, en moet certificering door derden volgens de relevante machineveiligheidsnormen (zoals EN 13000 voor kranen of ISO 11684 voor landbouwmachines) worden bevestigd bij de fabrikant van de aandrijving.
De verwachte levensduur moet worden besproken in termen van L10-lagerlevensduur (het aantal bedrijfsuren waarbij verwacht wordt dat 10% van een populatie van identieke aandrijvingen lagervermoeidheidsproblemen zal vertonen) en de levensduur van wormwieloppervlaktevermoeidheid. Voor zonne-trackingtoepassingen is een ontwerplevensduur van 25 jaar de industrienorm; bevestig dat de berekening van de L10-levensduur van de fabrikant gebaseerd is op het feitelijke bedrijfsbelastingsprofiel van de toepassing, en niet op een algemene referentieomstandigheid.
Praktische checklist voordat u uw selectie voltooit
- Bevestig axiale belasting, radiale piekbelasting en maximaal kantelmoment onder de slechtst denkbare omstandigheden (meestal maximale windsnelheid gecombineerd met maximale excentrische belasting)
- Controleer of het nominale werkkoppel van de geselecteerde aandrijving het berekende vereiste uitgangskoppel met de gekozen veiligheidsfactor overschrijdt
- Controleer de overbrengingsverhouding op zelfblokkering als passief vasthouden van de positie vereist is, of bevestig de remspecificatie als dit niet het geval is
- Controleer of de IP-classificatie, het temperatuurbereik en de corrosiebescherming overeenkomen met de installatieomgeving
- Controleer de afmetingen van de boutcirkel, de configuratie van de uitgaande ring en de vereisten voor de centrale boring ten opzichte van het ontwerp van de passende structuur
- Vraag een L10-berekening van de levensduur van lagers aan op basis van het daadwerkelijke belastingsprofiel van de toepassing, niet op basis van catalogusreferentievoorwaarden
- Bevestig de compatibiliteit van de motorinterface - framegrootte, asdiameter en montageflensnorm (IEC of NEMA)
- Controleer de smeerspecificaties en het smeerinterval aan de hand van het geplande onderhoudsschema
Selectie van horizontale zwenkaandrijvingen beloont methodische analyse. De aandrijvingen zelf zijn robuuste, beproefde componenten; de fouten die in het veld optreden zijn bijna altijd terug te voeren op een ondergespecificeerde belastingsparameter, een niet-overeenkomende omgevingsclassificatie of een over het hoofd geziene interfacebeperking. Werk systematisch door elk van de bovenstaande variabelen, schakel de technische ondersteuning van de fabrikant in als de toepassingsomstandigheden ongebruikelijk zijn, en het resultaat zal een schijf zijn die betrouwbaar presteert gedurende de volledige beoogde levensduur van het systeem dat erdoor wordt aangedreven.

Jiangsu Manchen Transmission Technology Co., Ltd. blinkt uit in het creëren van aangepaste, betrouwbare en precieze doodsleiders voor diverse industrieën, die voortdurend innoveren om aan de hoogste normen te voldoen en samenwerkingsmogelijkheden te zoeken. Betrouwbare en stabiele leverancier van de slewinglagers in China.
Productlinks
Neem contact met ons op
-
Address:Nr. 8, Nanqiu Road, Huangtu Town, Jiangyin City, China
-
Tel:+86-136461222221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
